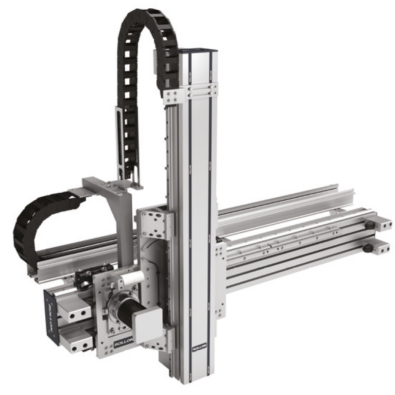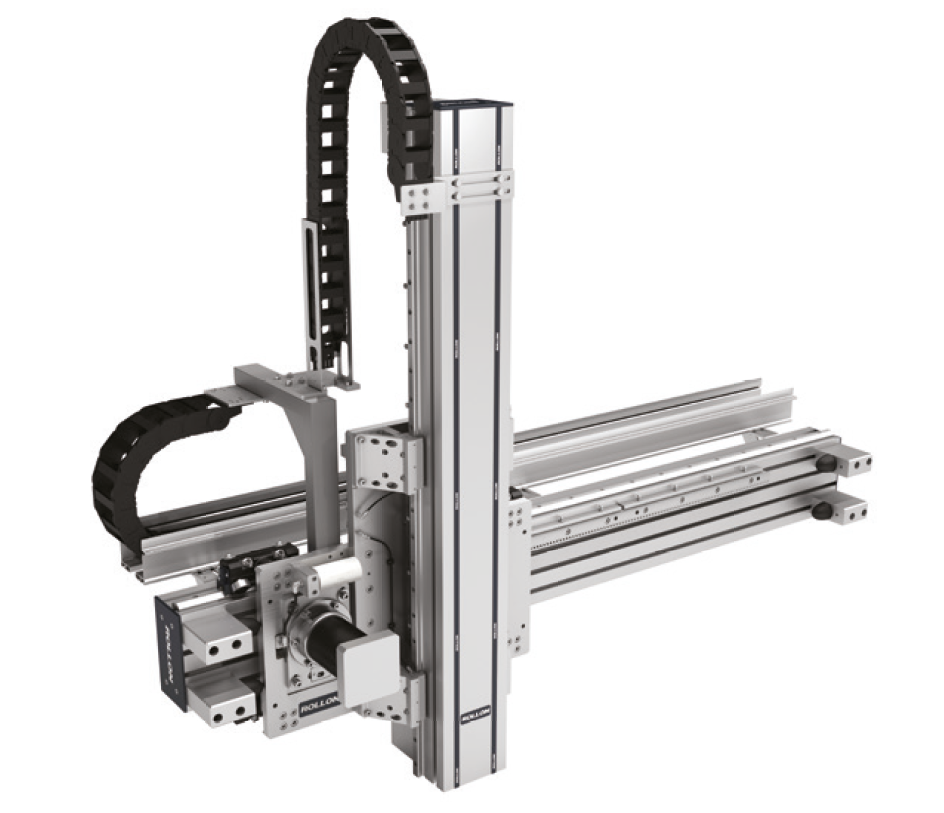
YZ PAR+PAR
Suwnica 2D do ładunków o masie do 300(*) kg z nieograniczonym skokiem osi Y do pracy w zanieczyszczonym środowisku. Prędkość/przyspieszenie do 2,5 m/s i 5 m/s²
Dostępne rozmiary
170/90
220/170
230/170
280/220
360/220
360/280
Obszar roboczy konfigurowalny do :
Y : 50 000 mm
Z : 3 000 mm
(*) Większe obciążenia można osiągnąć dzięki dodatkowym opcjom, w przypadku takich zastosowań prosimy o kontakt z firmą Rollon.
Y : 50 000 mm
Z : 3 000 mm
(*) Większe obciążenia można osiągnąć dzięki dodatkowym opcjom, w przypadku takich zastosowań prosimy o kontakt z firmą Rollon.
Główne zalecenia

- Napęd realizowany za pomocą koła i listwy zębatej z utwardzanymi i szlifowanymi zębami spiralnymi
- Składa się z modułów liniowych “Tecline PAR”
- Dobra powtarzalność – nawet na bardzo długich odcinkach
- Lekka i sztywna konstrukcja Y-Z składająca się z belek z ekstrudowanego i anodowanego aluminium
- Manipulator wykonywany na zamówienie i z dostosowanym skokiem
- Na życzenie udostępniamy dokumentację techniczną z informacjami na temat obliczeń
- Dostępnych jest wiele akcesoriów mechanicznych: wspornik czujnika, automatyczne smarowanie, blokada pionowa, zabezpieczenie przed upadkiem
- Zintegrowana prowadnica i prowadnik kablowy. Możliwość zastosowania kilku niezależnych osi Z